Hierarchical Bayesian Neural Networks#
Code is based on This blog post by Thomas Wiecki (see Original PyMC3 Notebook). Converted to Blackjax by Aleyna Kara (@karalleyna) and Kevin Murphy (@murphyk). (For a Numpyro version, see here.)
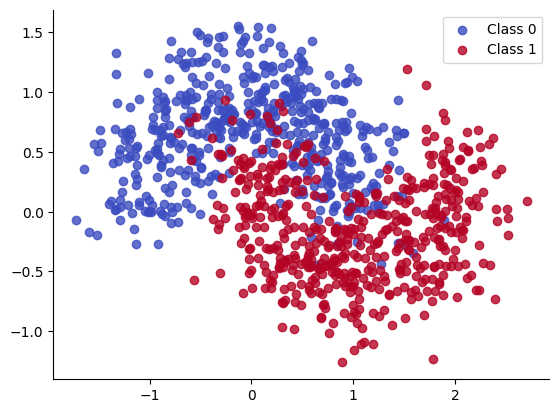
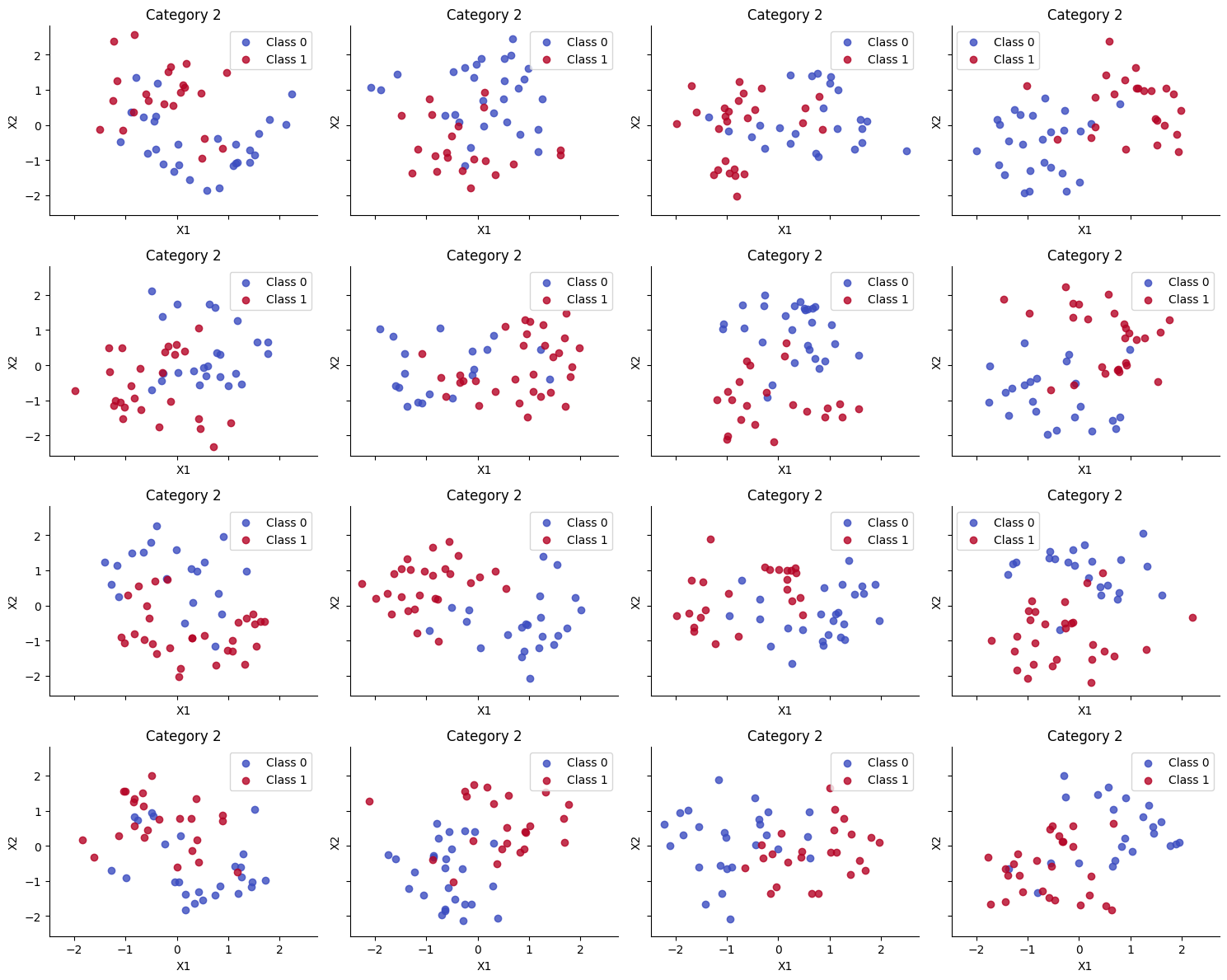
We create T=18 different versions of the “two moons” dataset, each rotated by a different amount. These correspond to T different nonlinear binary classification “tasks” that we have to solve. We only get a few labeled samples from each each task, so solving them separately (with T independent MLPs, or multi layer perceptrons) will result in poor performance. If we pool all the data, and fit a single MLP, we also get poor performance, because we are mixing together different decision boundaries. But if we use a hierarchical Bayesian model, with one MLP per task, and one learned prior MLP, we will get better results, as we will see.
Below is a high level illustration of the multi-task setup. \(\Phi\) is the learned prior, and \(\Theta_t\) are the parameters for task \(t\). We assume \(N^t=50\) training samples per task, and \(M^t=50\) test samples. (We could of course consider more imbalanced scenarios.)

Setup#
import jax
from datetime import date
rng_key = jax.random.key(int(date.today().strftime("%Y%m%d")))
from functools import partial
from warnings import filterwarnings
from flax import linen as nn
from flax.linen.initializers import ones
import jax.numpy as jnp
import numpy as np
import tensorflow_probability.substrates.jax.distributions as tfd
from sklearn.datasets import make_moons
from sklearn.preprocessing import scale
import blackjax
filterwarnings("ignore")
import matplotlib as mpl
cmap = mpl.colormaps["coolwarm"]
Data#
We create T=18 different versions of the “two moons” dataset, each rotated by a different amount. These correspond to T different binary classification “tasks” that we have to solve.
n_groups = 18
n_grps_sq = int(np.sqrt(n_groups))
n_samples = 100
def rotate(X, deg):
theta = np.radians(deg)
c, s = np.cos(theta), np.sin(theta)
R = np.matrix([[c, -s], [s, c]])
X = X.dot(R)
return np.asarray(X)
np.random.seed(31)
Xs, Ys = [], []
for i in range(n_groups):
# Generate data with 2 classes that are not linearly separable
X, Y = make_moons(noise=0.3, n_samples=n_samples)
X = scale(X)
# Rotate the points randomly for each category
rotate_by = np.random.randn() * 90.0
X = rotate(X, rotate_by)
Xs.append(X)
Ys.append(Y)
Xs = jnp.stack(Xs)
Ys = jnp.stack(Ys)
Xs_train = Xs[:, : n_samples // 2, :]
Xs_test = Xs[:, n_samples // 2 :, :]
Ys_train = Ys[:, : n_samples // 2]
Ys_test = Ys[:, n_samples // 2 :]
Utility Functions for Training and Testing#
def inference_loop(rng_key, step_fn, initial_state, num_samples):
def one_step(state, rng_key):
state, _ = step_fn(rng_key, state)
return state, state
keys = jax.random.split(rng_key, num_samples)
_, states = jax.lax.scan(one_step, initial_state, keys)
return states
def get_predictions(model, samples, X, rng_key):
vectorized_apply = jax.vmap(model.apply, in_axes=(0, None), out_axes=0)
z = vectorized_apply(samples, X)
predictions = tfd.Bernoulli(logits=z).sample(seed=rng_key)
return predictions.squeeze(-1)
def get_mean_predictions(predictions, threshold=0.5):
# compute mean prediction and confidence interval around median
mean_prediction = jnp.mean(predictions, axis=0)
return mean_prediction > threshold
def fit_and_eval(
rng_key,
model,
logdensity_fn,
X_train,
Y_train,
X_test,
grid,
n_groups=None,
num_warmup=1000,
num_samples=500,
):
(
init_key,
warmup_key,
inference_key,
train_key,
test_key,
grid_key,
) = jax.random.split(rng_key, 6)
if n_groups is None:
initial_position = model.init(init_key, jnp.ones(X_train.shape[-1]))
else:
initial_position = model.init(init_key, jnp.ones(X_train.shape))
# initialization
logprob = partial(logdensity_fn, X=X_train, Y=Y_train, model=model)
# warm up
adapt = blackjax.window_adaptation(blackjax.nuts, logprob)
(final_state, params), _ = adapt.run(warmup_key, initial_position, num_warmup)
step_fn = blackjax.nuts(logprob, **params).step
# inference
states = inference_loop(inference_key, step_fn, final_state, num_samples)
samples = states.position
# evaluation
predictions = get_predictions(model, samples, X_train, train_key)
Y_pred_train = get_mean_predictions(predictions)
predictions = get_predictions(model, samples, X_test, test_key)
Y_pred_test = get_mean_predictions(predictions)
pred_grid = get_predictions(model, samples, grid, grid_key)
return Y_pred_train, Y_pred_test, pred_grid
Hyperparameters#
We use an MLP with 2 hidden layers, each with 5 hidden units.
# MLP params
hidden_layer_width = 5
n_hidden_layers = 2
Fit Separate MLPs, One Per Task#
Let \(w^t_{ijl}\) be the weight for node \(i\) to node \(j\) in layer \(l\) in task \(t\). We assume $\( w^t_{ijl} \sim N(0,1) \)$ and compute the posterior for all the weights.
class NN(nn.Module):
n_hidden_layers: int
layer_width: int
@nn.compact
def __call__(self, x):
for i in range(self.n_hidden_layers):
x = nn.Dense(features=self.layer_width)(x)
x = nn.tanh(x)
return nn.Dense(features=1)(x)
bnn = NN(n_hidden_layers, hidden_layer_width)
def logprior_fn(params):
leaves, _ = jax.tree_util.tree_flatten(params)
flat_params = jnp.concatenate([jnp.ravel(a) for a in leaves])
return jnp.sum(tfd.Normal(0, 1).log_prob(flat_params))
def loglikelihood_fn(params, X, Y, model):
logits = jnp.ravel(model.apply(params, X))
return jnp.sum(tfd.Bernoulli(logits).log_prob(Y))
def logdensity_fn_of_bnn(params, X, Y, model):
return logprior_fn(params) + loglikelihood_fn(params, X, Y, model)
rng_key, eval_key = jax.random.split(rng_key)
keys = jax.random.split(eval_key, n_groups)
def fit_and_eval_single_mlp(key, X_train, Y_train, X_test):
return fit_and_eval(
key, bnn, logdensity_fn_of_bnn, X_train, Y_train, X_test, grid, n_groups=None
)
Ys_pred_train, Ys_pred_test, ppc_grid_single = jax.vmap(fit_and_eval_single_mlp)(
keys, Xs_train, Ys_train, Xs_test
)
Results#
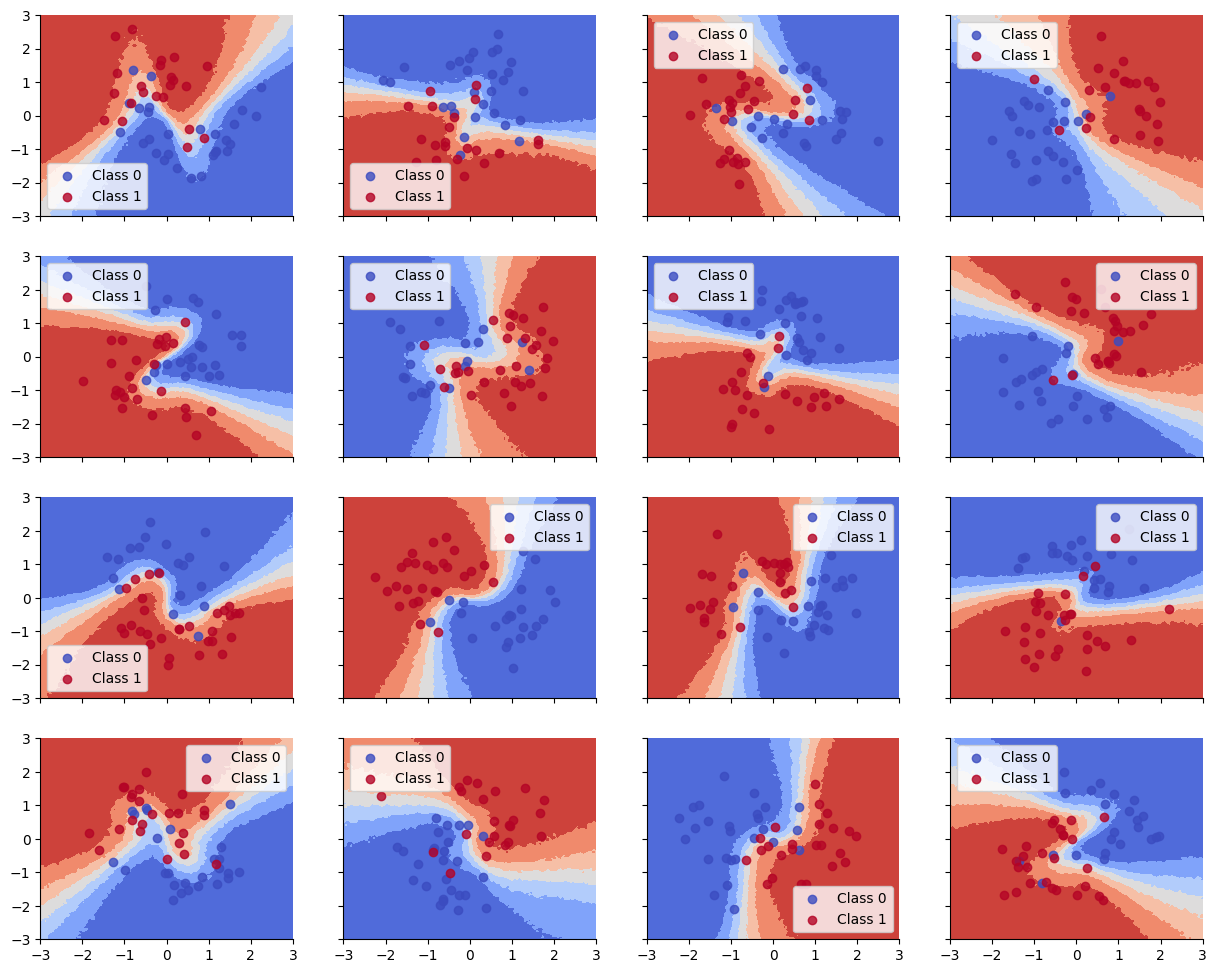
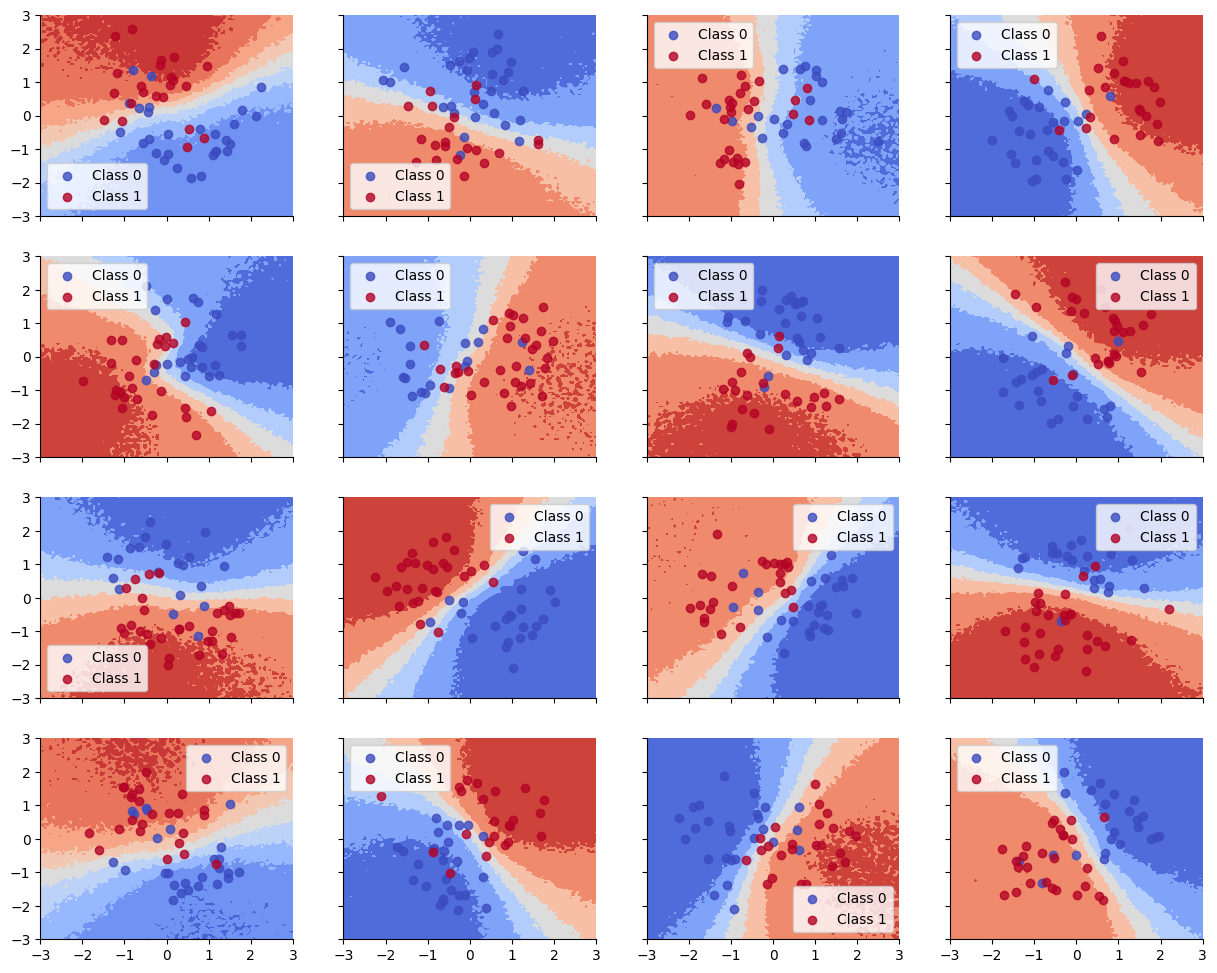
Accuracy is reasonable, but the decision boundaries have not captured the underlying Z pattern in the data, due to having too little data per task. (Bayes model averaging results in a simple linear decision boundary, and prevents overfitting.)
Train accuracy = 86.89%
Test accuracy = 82.22%
Below we show that the decision boundaries do not look reasonable, since there is not enough data to fit each model separately.
Hierarchical Model#
Now we use a hierarchical Bayesian model, which has a common Gaussian prior for all the weights, but allows each task to have its own task-specific parameters. More precisely, let \(w^t_{ijl}\) be the weight for node \(i\) to node \(j\) in layer \(l\) in task \(t\). We assume $\( w^t_{ijl} \sim N(\mu_{ijl}, \sigma_l) \)$
or, in non-centered form, $\( w^t_{ijl} = \mu_{ijl} + \epsilon^t_{ijl} \sigma_l \)$
In the figure below, we illustrate this prior, using an MLP with D inputs, 2 hidden layers (of size \(L_1\) and \(L_2\)), and a scalar output (representing the logit).

class NonCenteredDense(nn.Module):
features: int
@nn.compact
def __call__(self, x):
mu = self.param("mu", jax.random.normal, (x.shape[-1], self.features))
eps = self.param(
"eps", jax.random.normal, (n_groups, x.shape[-1], self.features)
)
std = self.param("std", ones, 1)
w = mu + std * eps
return x @ w
class HNN(nn.Module):
n_hidden_layers: int
layer_width: int
@nn.compact
def __call__(self, x):
for i in range(self.n_hidden_layers):
x = NonCenteredDense(features=self.layer_width)(x)
x = nn.tanh(x)
return nn.Dense(features=1)(x)
hnn = HNN(n_hidden_layers, hidden_layer_width)
def logprior_fn_of_hnn(params, model):
lp = 0
half_normal = tfd.HalfNormal(1.0)
for i in range(model.n_hidden_layers):
lparam = params["params"][f"NonCenteredDense_{i}"]
lp += tfd.Normal(0.0, 1.0).log_prob(lparam["mu"]).sum()
lp += tfd.Normal(0.0, 1.0).log_prob(lparam["eps"]).sum()
lp += half_normal.log_prob(lparam["std"]).sum()
lp += logprior_fn(params["params"]["Dense_0"])
return lp
def loglikelihood_fn(params, X, Y, model):
logits = jnp.ravel(model.apply(params, X))
return jnp.sum(tfd.Bernoulli(logits).log_prob(jnp.ravel(Y)))
def logdensity_fn_of_hnn(params, X, Y, model):
return logprior_fn_of_hnn(params, model) + loglikelihood_fn(params, X, Y, model)
%%time
rng_key, inference_key = jax.random.split(rng_key)
Ys_hierarchical_pred_train, Ys_hierarchical_pred_test, ppc_grid = fit_and_eval(
inference_key,
hnn,
logdensity_fn_of_hnn,
Xs_train,
Ys_train,
Xs_test,
grid_3d,
n_groups=n_groups,
)
CPU times: user 1min 5s, sys: 405 ms, total: 1min 5s
Wall time: 59.1 s
Results#
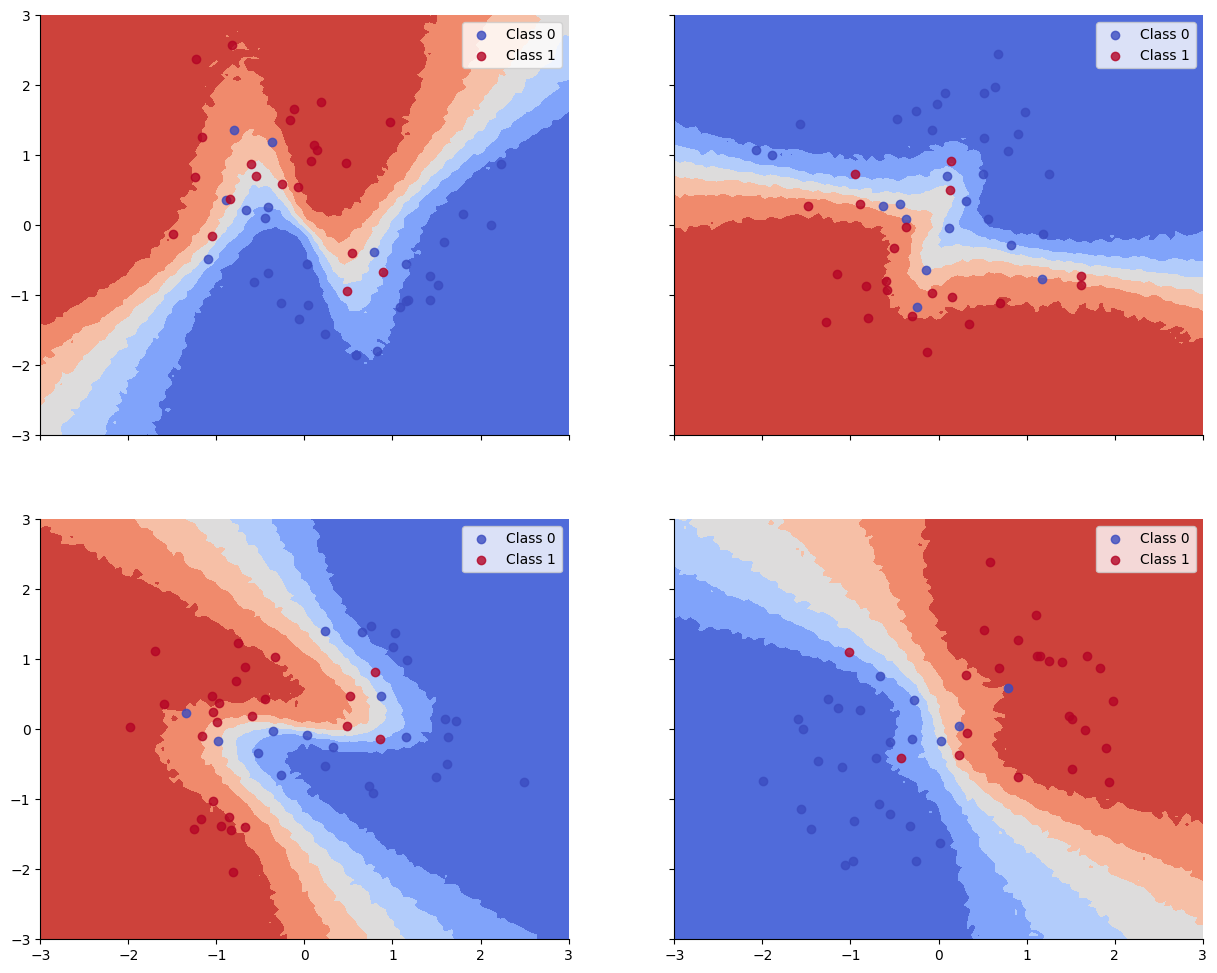
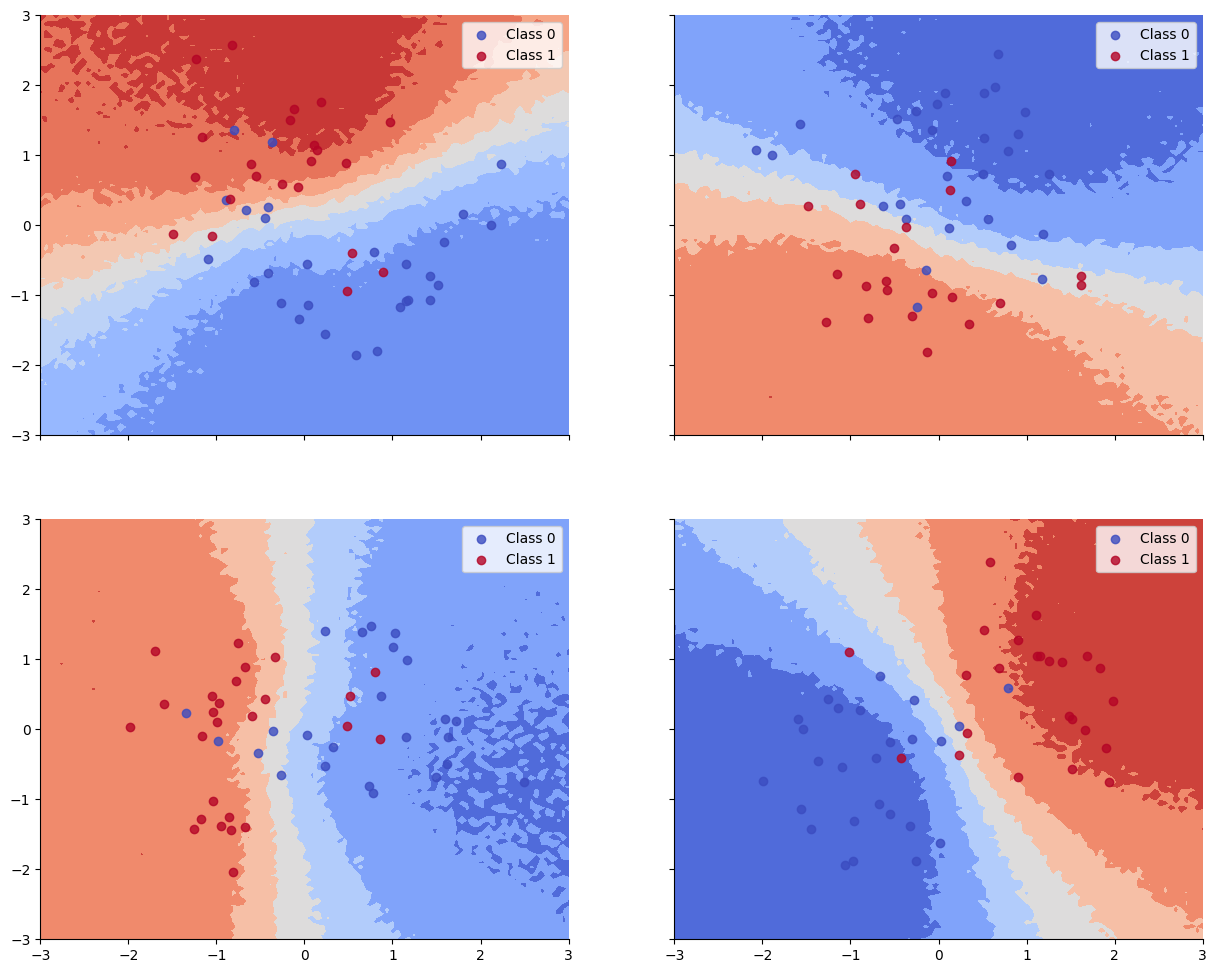
We see that the train and test accuracy are higher, and the decision boundaries all have the shared “Z” shape, as desired.
Train accuracy = 91.00%
Test accuracy = 87.33%
def plot_decision_surfaces_hierarchical(nrows=2, ncols=2):
fig, axes = plt.subplots(
figsize=(15, 12), nrows=nrows, ncols=ncols, sharex=True, sharey=True
)
for i, (X, Y_pred, Y_true, ax) in enumerate(
zip(Xs_train, Ys_hierarchical_pred_train, Ys_train, axes.flatten())
):
ax.contourf(
grid[:, 0].reshape((100, 100)),
grid[:, 1].reshape((100, 100)),
ppc_grid[:, i, :].mean(axis=0).reshape(100, 100),
cmap=cmap,
)
for i in range(2):
ax.scatter(
X[Y_true == i, 0], X[Y_true == i, 1],
color=cmap(float(i)), label=f"Class {i}", alpha=.8)
ax.legend()